モータードライバによる制御性の違いについて
MDの違いで回転数にどんな違いがでるか調べた話
はじめに
主にロボカップジュニア民向けの記事になります.
この昔の記事の続き的な感じになりますので,まずはこちらを読んで下さい.
この記事のまとめとして『VNH2SP30はSMで20kHzしか出せないのでくそ』ということでした.
また,『LAPで200kHzのモータードライバがいいよ』と書きました.
(用語に関しては以前の記事で解説しているので省略します.)
そんなこと言っても,「モータ回ればなんでもいいじゃん」という人がいると思うので,回路による制御性の違いについて書きます.
実験方法
PWMを最小–>最大–>最小と変化させたときの回転数を測定し,グラフにします.
回路はこの通りです.
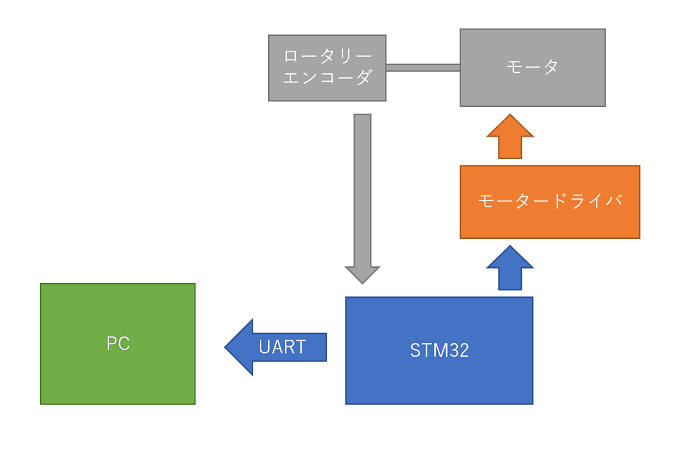
実験器具
モータ:MAXON
エンコーダ:E6A2-CWZ3C
モータードライバ:VNH2SP30 と DRV8432
マイコン:STM32F072C8T6 (CubeHAL)
PC:python と Excel
(pythonで読んでるのになんでExcel使ったっていうツッコミはしないでください,手抜きです)
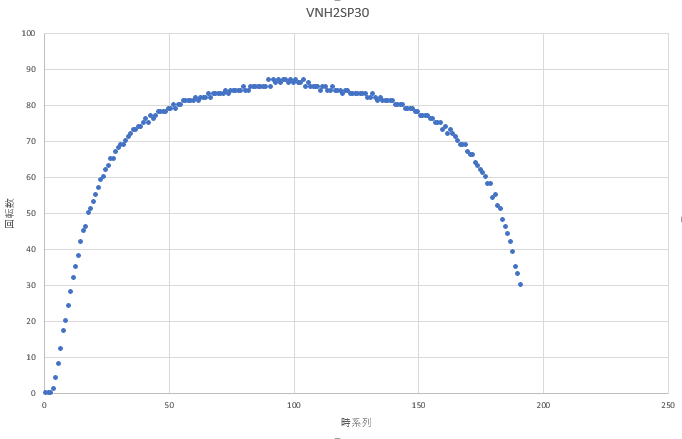
VNH2SP30による制御
RCJ界隈で若干流行ってる感じのあるICです.
測定条件はSMの20kHzです.いわゆる『電流非連続モード』です.
※回転数(無次元)に対する時系列データと思ってください.
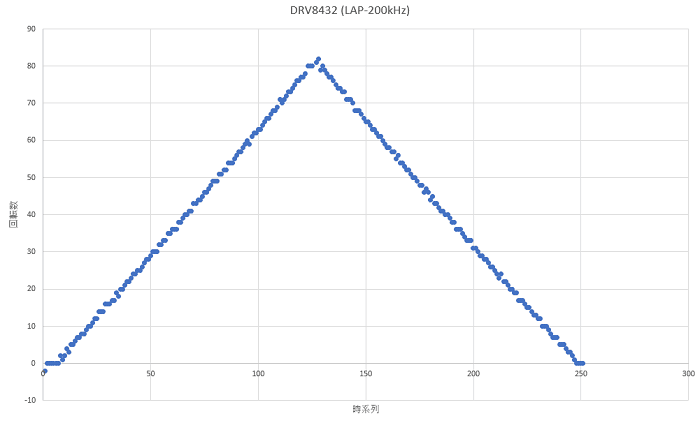
DRV8432による制御
今年の世界大会で使ったICです.
測定条件はLAPの200kHzです.いわゆる『電流連続モード』です.
※回転数(無次元)に対する時系列データと思ってください.
まとめ
電流非連続モードでは線形性が出なかった,というわかりきった結果になったけど,自分で測定できてよかった.
電流連続モードはまじで線形的で感動した.
電流連続ばんざい.