モータードライバによる制御性の違いについて2
MDの違いで回転数にどんな違いがでるか調べた話 その2
Sun, 24 Dec 2017
前回の続きです.
今回はだいぶ前に疑問として残っていた「SMでも電流連続ならどうなの?」を実験しました.
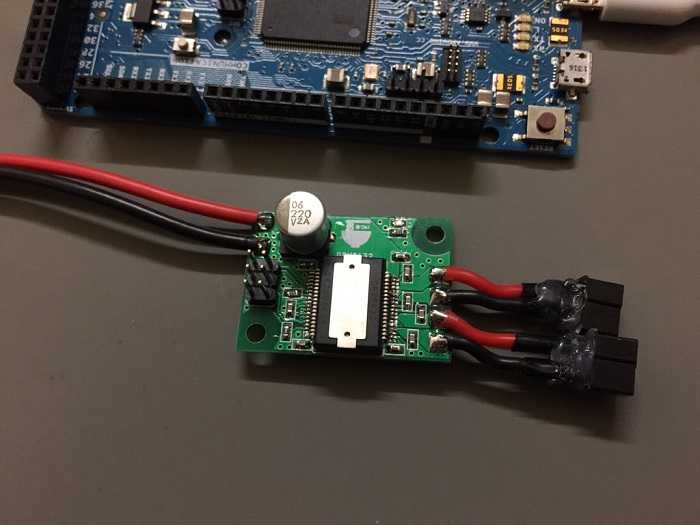
これまでのDRV8432基板ではSM使う気がなかったのでLAPしか使えないように設計しましたが今回はこのために基板を新調し,LAPとSM選べるようにしました.
実験方法
前回と同様.
PWMは1ピンしかださず連続して回転数を読むので,LAPは両回転,SMは片回転での測定になります.(手抜き)
実験結果
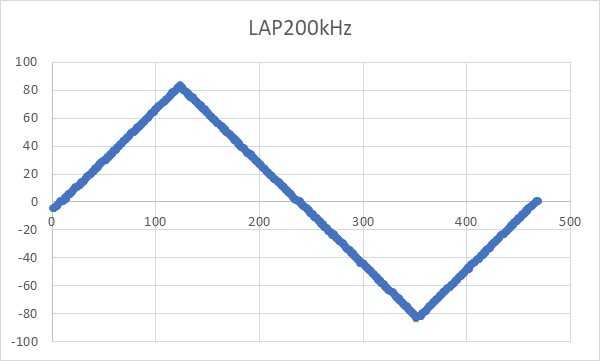
LAP200kHz
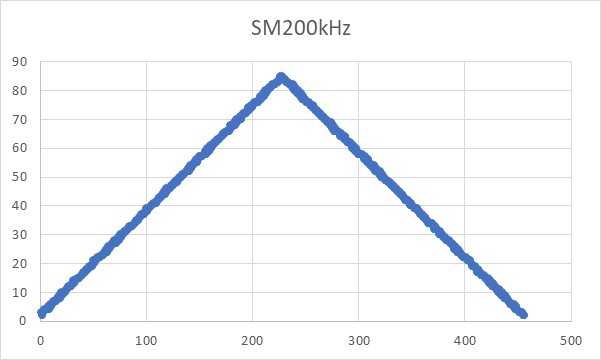
SM200kHz
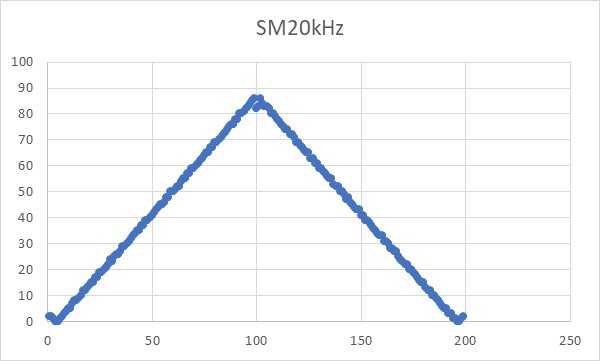
SM20kHz
SM1kHz
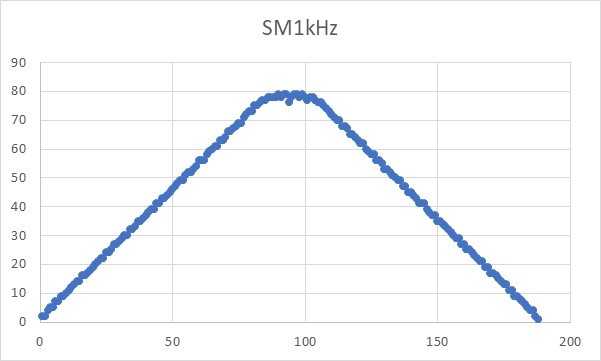
全部それなりに線形的じゃねーか!!!!!!
という結果になりました.
前回のSM20kHzだと線形性がでないのはVNH2SP30の波形が汚いからなのでは・・・
また低周波だと特性が汚く見えますが,実際そうなんだろうというのと,時間軸が一緒じゃないのでそんなにあてになりません.
どっち使うのがいいの?
感覚的にはLAPの方がモータを制御している感じがあって好き(自己満足)ですが,PWMの分解能の半分になってしまうので残念です.
SMは片回転ずつにPWMの分解能を使えるのでお得です.
正直自由です.
一番大事なことはロボットが動くことです.